2017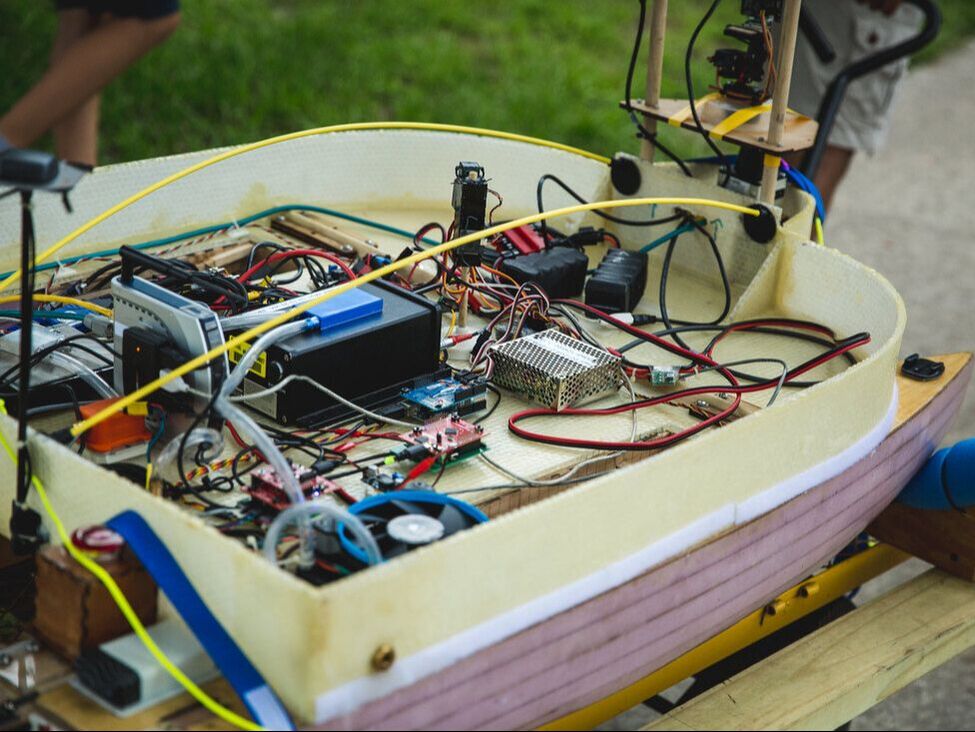
|
2018
|
2021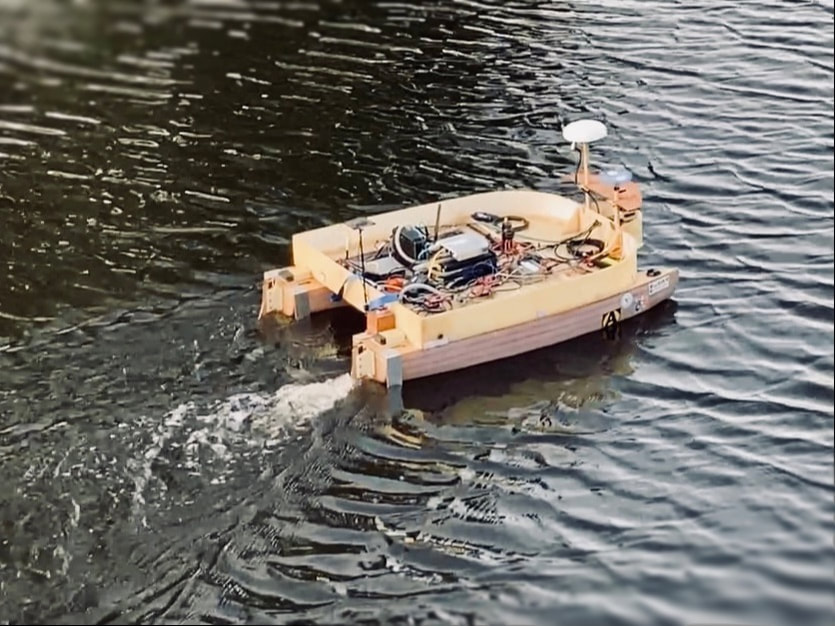
|
Meet Sir Docks-a-Lot

|
Our boat, Sir Docks-A-Lot, is a catamaran constructed from pink insulation foam, Nida-core, fiberglass, and epoxy. We opted to utilize a catamaran design in order to maintain stability as well as focus on agility, maneuverability, and speed throughout the competition. The three hulls were made using alternating layers of pink insulation foam and polyurethane gorilla glue, helping us increase our speed. Both hulls were then shaped using a sanding disk and reinforced using fiberglass cloth and epoxy.
To increase the boat’s load-bearing capabilities and overall stability, a third hull was created to support the catamaran center. For this hull, the team experimented with VCarve Pro software to create a CAM for an X-Carve, a small CNC machine, that could create the curved, hydrodynamic shape of the hull directly. Three pairs of 9inx22in foam pieces were adjoined with polyurethane gorilla glue, and the hull was split into three separate X-Carve operations. |
Modeling
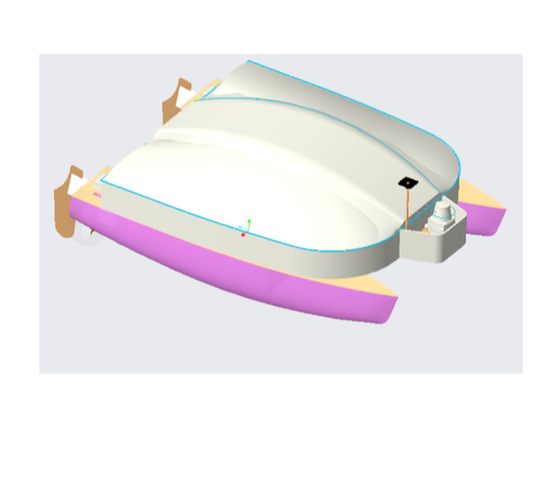
The Water Dogs chose to utilize multiple CAD and CAM programs such as PTC Creo, Autodesk 123D, Orca3D, Rhinoceros, and VCarve in order to make sure our design would be tailored to our team's goals. All of the 3D printed parts on the boat were created using PTC Creo. To make the two main hulls, we used Orca3D to design our basic hull shape, and then imported the model into Autodesk 123D in order to have a format that the laser cutter could recognize. The third hull, initially designed in Rhinoceros and sliced in Autodesk 123D, utilized VCarve to generate G-code that could be used on the X-Carve.
We also simulated our paddlewheel in PTC Creo, and utilized simulation software to "run" our boat digitally before finalizing different design elements. Computer-aided design is very important to the team, as not only does it facilitate easy and efficient design, but it also balances experimentation with creation.
We also simulated our paddlewheel in PTC Creo, and utilized simulation software to "run" our boat digitally before finalizing different design elements. Computer-aided design is very important to the team, as not only does it facilitate easy and efficient design, but it also balances experimentation with creation.
Software

|
The Water Dogs use multiple methods of navigation through the water such as; LIDAR, an Inertial Measurement Unit (IMU), and a Global Positioning System (GPS). The IMU works as a combined gyroscope, accelerometer, and magnetometer. The GPS allows us to locate and help position the boat, and acts as an extension of the IMU. We use a NAVCOM Starfire-2050 M GPS, which features Precise Point Positioning (PPP), allowing tracking accuracy within one meter. We also use our paddlewheel with a digital encoder as an odometer to track our progression through the course. Data from these various sensors is interpreted to create a global map of where the boat is located on the course based on the movement of the odometer and the GPS data being relayed from the boat.
|
We utilize ROS (Robot Operating System) for our boat because it offers a free, open source system that has a great layout for adding packages and continued development. As its primary use is for robotics, utilizing it for our boat had many benefits for us as a team. ROS provides a skeleton for all of the team’s software systems. Using ROS, nodes can be made for each boat subsystem. It’s development environment provides the team with many software tools to aid in autonomous navigation. The team makes use of the built-in communication features in the ROS environment to receive data and output commands to the variety of sensors and motors. ROS uses a network of nodes that publish messages known as topics, which allow for one node to subscribe to or publish multiple sources of data or commands.
